Initial Thoughts // References // Inspiration
Here are some random robot sketches whilst on the train after class on Thursday. I've decided that i want to avoid humanoid robots (like the first) as i may aswell just draw a character if i was to do that. I want to play around with shapes and again try and make something believable (not too over the top and flashy, but still interesting and functional) my main inspirations here will likely be Scott Robertson and Feng Zhu.


Reference and inspiration links:
- Scott Robertson sketches > He is my idol for all things perspective and mechanical, i use the same marker workflow (just not as well as he does) so i would again like to use this in the early stages but try to push myelf further using this video as inspiration.
- http://conceptrobots.blogspot.co.uk/ < a massive dump of robot concepts from thousands of artists.

- Anthony Jones. I love the very graphic shape-driven process that he goes through in this video, i may not emulate it, but it certainly serves as inspiration.
- http://jparked.blogspot.co.uk/ < John Park is one of the best mech artists out there, he too uses pen and line very often - an area that i would really like to improve.

- http://www.fengzhudesign.com/gallery_page_01.htm < Last but not least, Feng Zhu - he is undoubtly one of my favorite artists and a bit inspiration of mine. For this brief i especially love his T-Rex landrover concept, its genius.

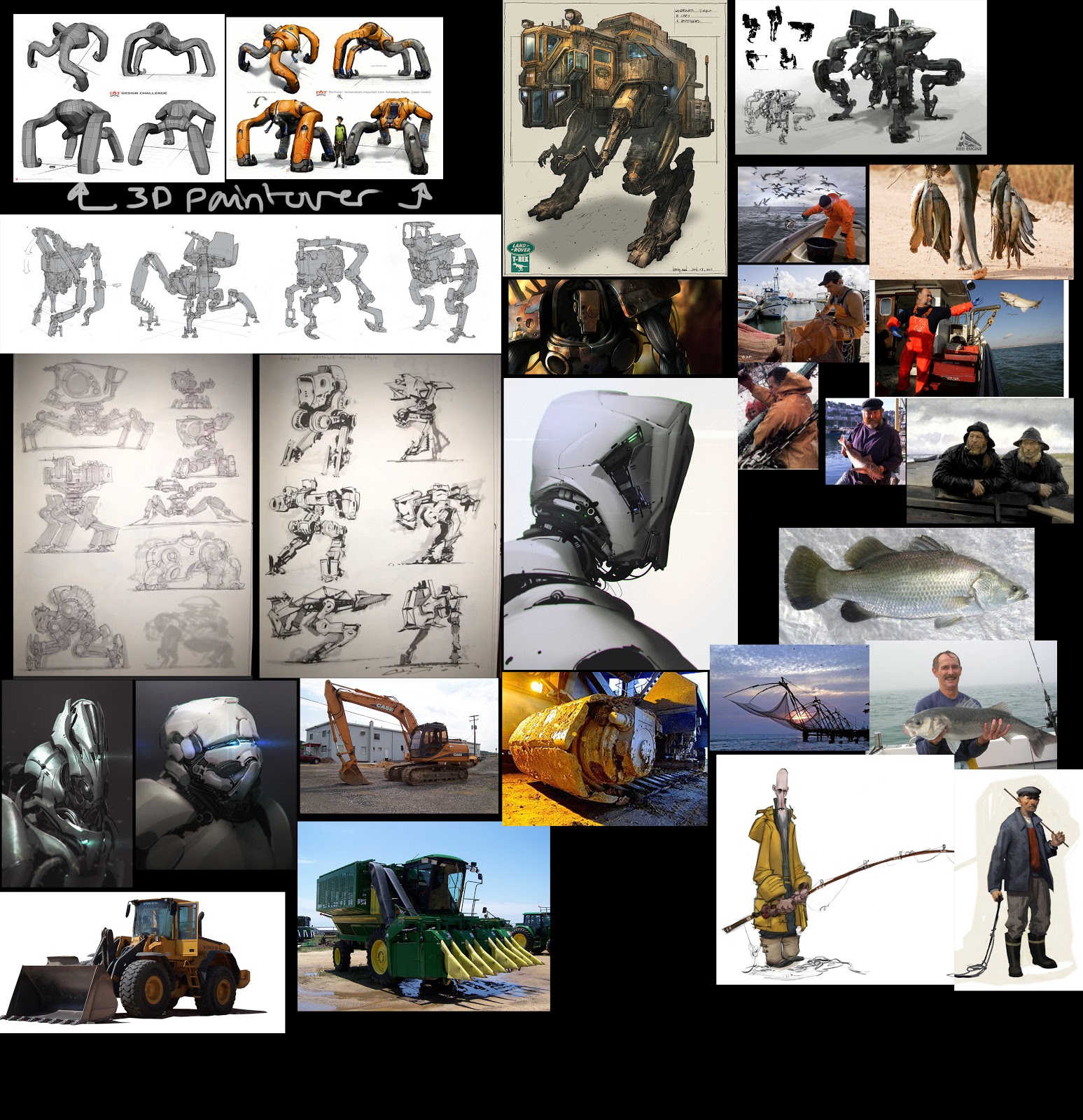
Here is the start to my reference sheet, i shall continue to add to it over the next few days.
I like to have a mix of other artists work in different styles and process (line, paint, 3d) aswell as photos of real-world objects, i know that i want to make something that isn't humanoid and is some form of construction bot - so I've found some real-world machines that i like the design of, to help bring believably to my design. Also after watching the SteamBot Studios video on their production pipeline, i would like to try a 3D paintover for my final concept shot - however this again will depend on how much time i can allocate to the project as the design itself comes first for me.

Description // Sketches // Developement
I've decided that i would like to create a new Wacom product for my Robot. There will be a large mounted tablet (similiar to the Cintiq 24HD but larger and better) with a comphy ergonomic seat, similiar to a cockpit setup with lots of controls around the user. The rest of the robot will support this area and will have AI to allow it to navigate from direction to direction, similiar to Sat Nav. The purpose of the robot is to serve as an on-the-go workstation for digital artists allowing them to paint Plein Air, on the way their destination or when away from home. The robot also has plenty of gadgets such as a 3D scanner and printer that allows it to instantly print anything created in 3D by the artist - for this reason they can be modified to be used by mechanics that allow them to print their own tools on the fly to fit any job situation that they come accross - aslong as they can design and create it using the software.
Here are the sketches that i can up with for the Wacom idea, pen and marker sketches from my sketchbook:

--HOWEVER--
After doing these sketches i decided that this idea is dumb and it was heading towards too much of a vehicle than a robot and then the purpose wasn't believable / functional enough for me. I have decided to go for a robot fisherman's assistant instead - i know it's a bit too late to change my mind, but i feel it will result in a stronger concept.
CONCEPT REDIRECTION
'Fi' (Fishing Intelligence) is a new robotic fisherman's companion. It's job is to eliminate large trawler ships and to bring small boat fishing back to the masses. 'Fi' uses sonar technology to scan masses of water within a 100m square radius, the sonar waves scan everything within the radius and filters out the fish - it uses the shape, mass, colour and weight to determine which species of fish are in the area and also how healthy they are. The scan also takes in information about the underwater terrain which recreates the area virtually within 'Fi' which allows him to mark and track the fish that they require. This information is also sent to the fisherman's hand-held tablet so that he or she can also fish appropriately. It also allows for 'Fi' to determine which bait would be best to use, increasing the success-rate. The scanning technology allows 'Fi' to catch only the healthiest fish of the required species, this means that no longer will fish be caught that aren't going to be used - eliminating the sorting process to increase productivity but also food quality. As Fi doesn't use large nets instead in order to catch the fish unawares he has camouflage technology fitted to his outer metallic plating which was created after years of studying the adaptive camouflage of octopus's. This allows Fi to place down bait and then sit nearby, blended into the environment - when the fish appears he can swipe it and put it into his backpack. Lastly, all of this information can be sent to the warehouses / markets / shops that will be selling the products, allowing them to instantly know which stock they have aswell as quality and other information, to help speed up their processes also.
The sketch in the bottom left was done by a friend of mine whilst getting coffee, which served as a nice bit of inspiration.



No comments:
Post a Comment